Przygotowałem krótką prezentację zrealizowanego pulpitu, którą zamieściłem w wątku "Elektromechanika" u Lucky'ego. W związku z licznymi pytaniami, które pojawiły się ze strony zainteresowanych, postanowiłem utworzyć dedykowany wątek.
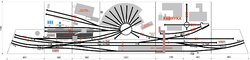
Na podstawie planu przygotowanego przez szwagra Krzysztofa "młodego" Młodzikowskiego (link do wątku):

powstał projekt pulpitu kostkowego:
 który wygląda tak:
który wygląda tak:
![]()
![]()
![]()
![]()
Tradycyjne sterowanie akcesoriami na makiecie, takimi jak rozjazdy czy semafory, często wiąże się z plątaniną kabli prowadzących do centralnego pulpitu. Dlatego postanowiłem wykorzystać mikrokontrolery ESP-8266 aby stworzyć bezprzewodowy i elastycznego system sterowania. Zamiast jednego centralnego kontrolera, sam pulpit staje się zbiorem niezależnych modułów – "kostek" – z których każda odpowiada za jeden konkretny element na makiecie.
Każda funkcja sterująca (np. jeden rozjazd, jeden semafor) jest obsługiwana przez parę urządzeń:
Zalety takiego rozwiązanie są oczywiste:
![]()
![]()
![]()
![]()
A tak serwo rozjazdu.
![]()
![]()
Będę wdzięczny za wszelkie komentarze, sugestie oraz uwagi dotyczące projektu.
Na podstawie planu przygotowanego przez szwagra Krzysztofa "młodego" Młodzikowskiego (link do wątku):
powstał projekt pulpitu kostkowego:
Tradycyjne sterowanie akcesoriami na makiecie, takimi jak rozjazdy czy semafory, często wiąże się z plątaniną kabli prowadzących do centralnego pulpitu. Dlatego postanowiłem wykorzystać mikrokontrolery ESP-8266 aby stworzyć bezprzewodowy i elastycznego system sterowania. Zamiast jednego centralnego kontrolera, sam pulpit staje się zbiorem niezależnych modułów – "kostek" – z których każda odpowiada za jeden konkretny element na makiecie.
Każda funkcja sterująca (np. jeden rozjazd, jeden semafor) jest obsługiwana przez parę urządzeń:
- Kostka sterująca (na pulpicie). Moduł, wewnątrz którego znajduje się mikrokontroler, na zewnątrz umieszczone są fizyczne elementy sterujące: przyciski (do zmiany położenia rozjazdu, semafora) oraz diody LED informujące o aktualnym stanie sparowanego elementu.
- Moduł wykonawczy (na makiecie). Moduł z mikrokontrolerem podłączony do napędu lub sygnalizatora.
Zalety takiego rozwiązanie są oczywiste:
- minimalizacja okablowania; koniec z ogromną ilością przewodów biegnących pod makietą. Każdy moduł wykonawczy potrzebuje tylko lokalnego zasilania
- maksymalna modularność i skalowalność; pulpit można rozbudowywać w dowolnym momencie, dodając kolejne kostki. Nie ma limitu liczby urządzeń, poza fizycznym miejscem
- niezawodność i odporność na awarie; awaria jednej kostki lub jednego modułu wykonawczego nie ma żadnego wpływu na działanie reszty systemu. Nie ma centralnego punktu awarii
- brak konfliktów i zakłóceń; komunikacja jest ściśle "jeden do jednego" (peer-to-peer, nie mesh), nie ma ryzyka, że polecenie dla jednego rozjazdu zostanie przechwycone przez inny
- łatwość diagnostyki; jeśli dany rozjazd nie działa, problem jest ograniczony do jednej pary urządzeń: jego kostki sterującej i modułu wykonawczego


A tak serwo rozjazdu.

Będę wdzięczny za wszelkie komentarze, sugestie oraz uwagi dotyczące projektu.
Załączniki
-
 168,5 KB Wyświetleń: 7
168,5 KB Wyświetleń: 7 -
 128,1 KB Wyświetleń: 7
128,1 KB Wyświetleń: 7
-
 1
1
-
 2
2
-
 2
2
- Pokaż wszystkie
")